Biography
I am a PhD student in the Mobility Transformation Lab at the University of Michigan. Before that, I received a MSc from the Intelligent Driving Lab at Tsinghua University. My research covers neural network, reinforcement learning, autonomous driving, and quantum computing. I am dedicated to building more intelligent and safer AI for automated vehicles, while also developing the next-generation paradigm for neural network training.
- Reinforcement Learning
- Autonomous Driving
- Quantum Computing
University of Michigan
Ph.D in Civil Engineering & Scientific Computing
Tsinghua University
M.Sc in Mechanical Engineering
Recent News
⚡
🎉
🎉
🎉
🎉
🎉
🎉
Experiences
Featured Publications
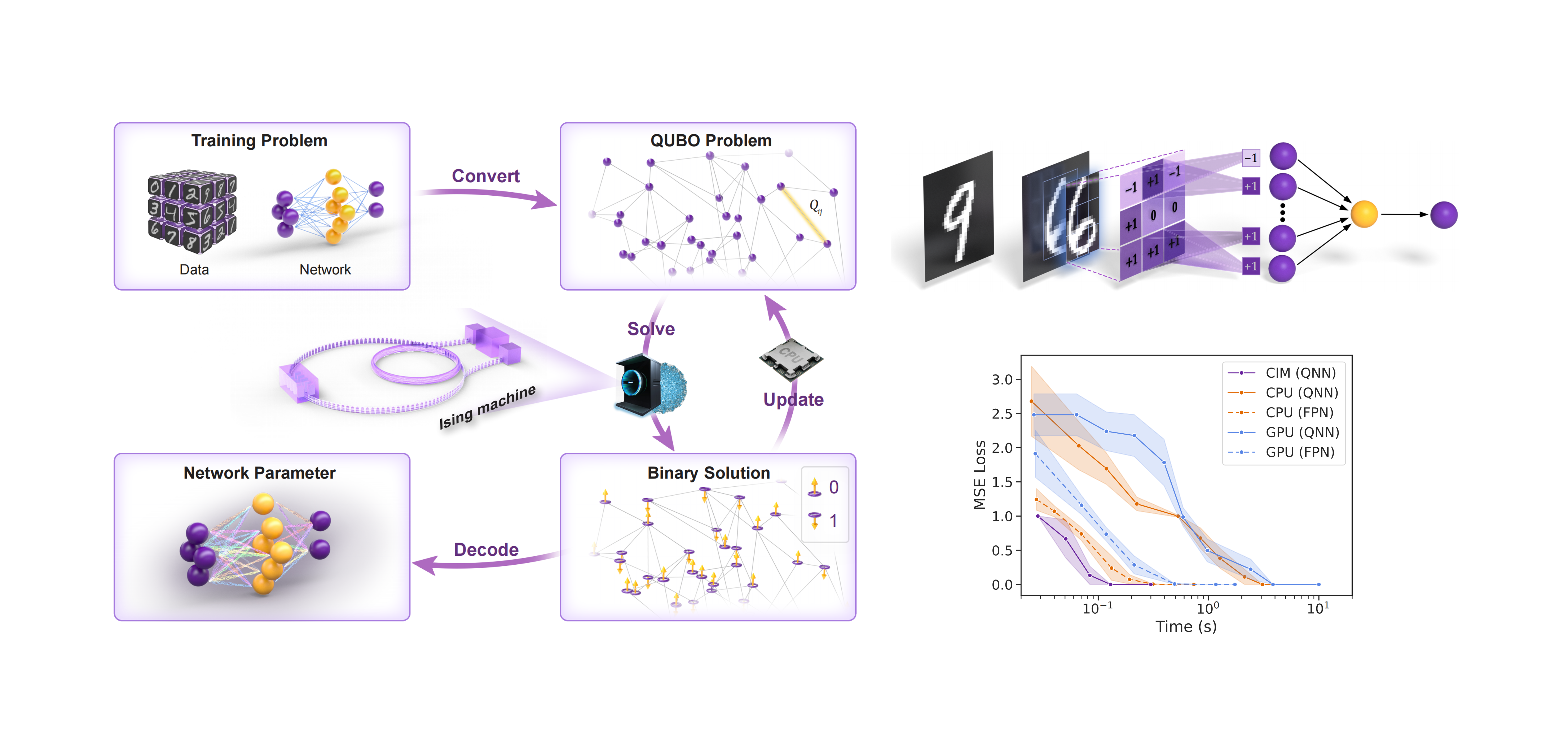
We proposed Ising learning algorithm, the first technique to train multilayer feedforward neural networks on Ising machines (quantum computers). The training time is reduced by 90% compared to CPU/GPU.
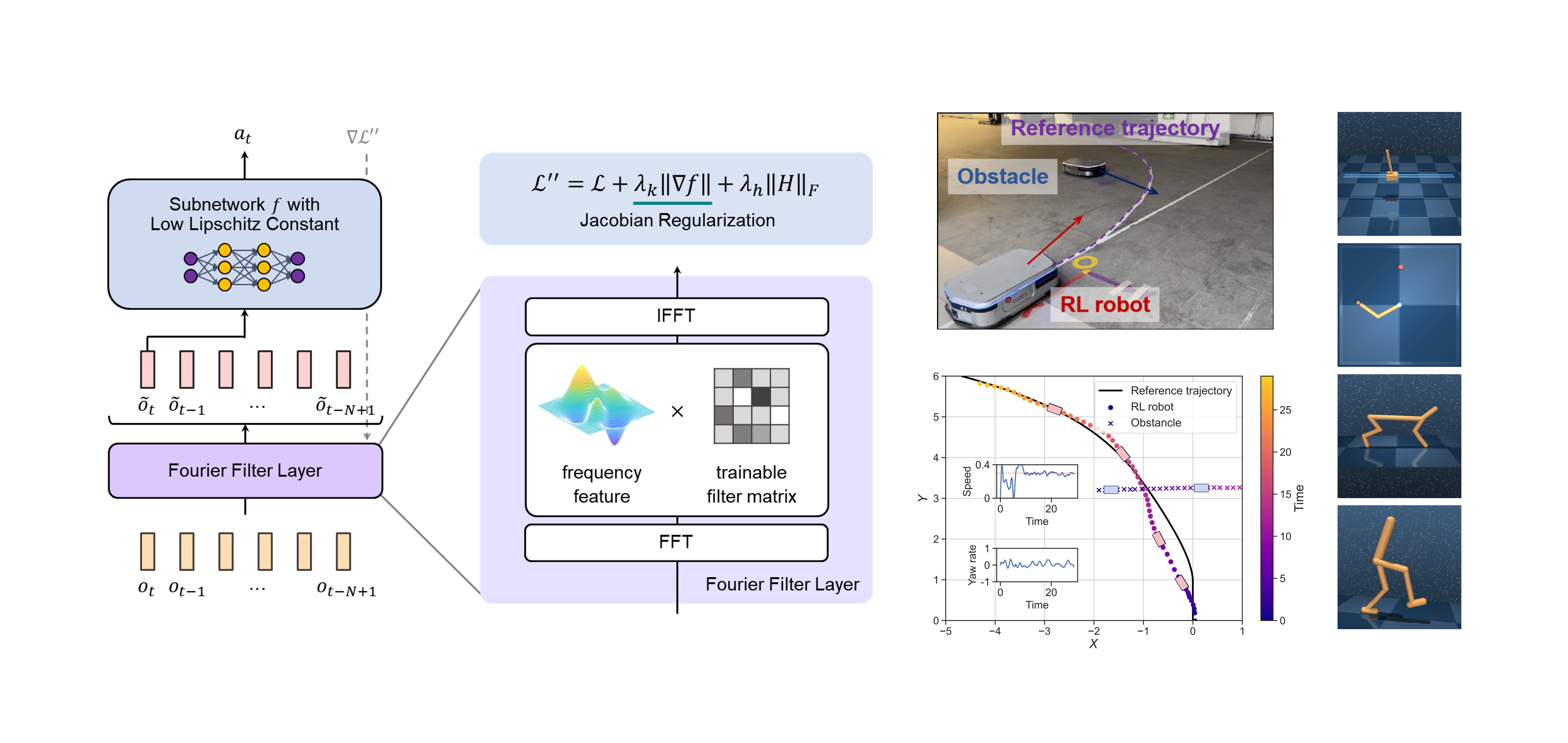
We unified the filtering and control capabilities into a single policy network in RL, achieving SOTA noise robustness and action smoothness in real-world control tasks.
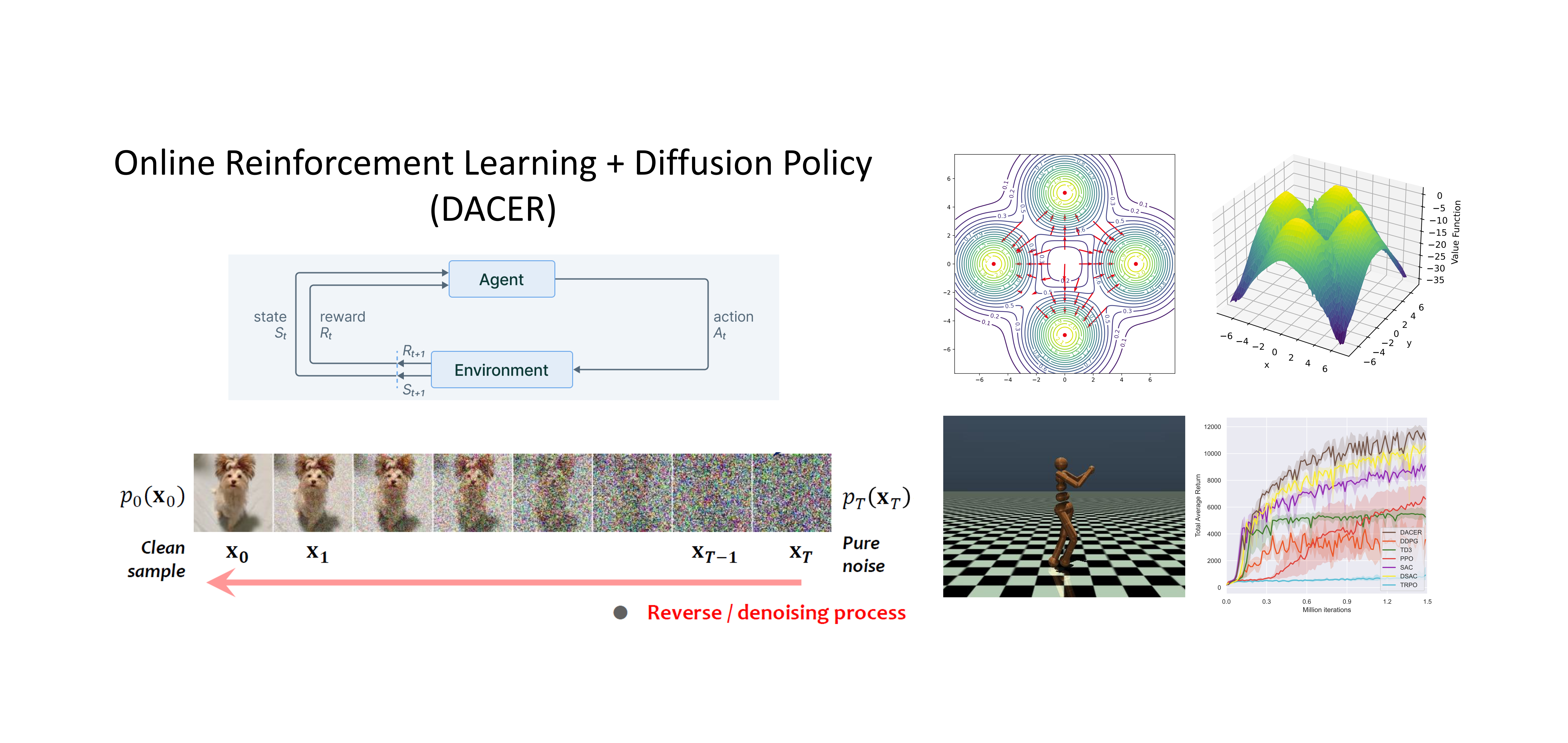
We proposed DACER, an online reinforcement learning algorithm that utilizes a diffusion model as the actor network to enhance the representational capacity of the policy.
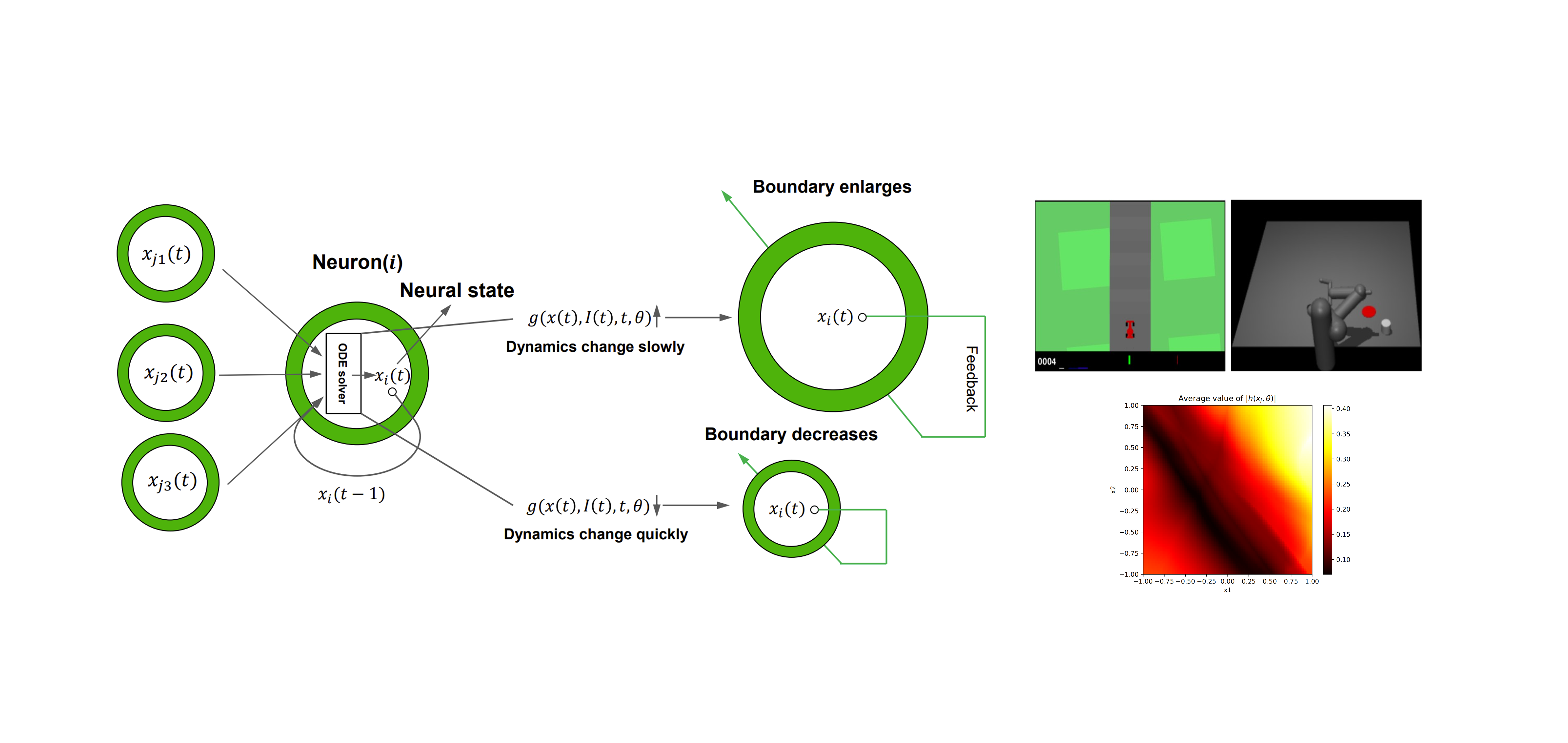
we proposed a variant of neural ODE, called SmODE, to smooth out control actions in RL. A mapping function is incorporated to estimate the changing speed of system dynamics.
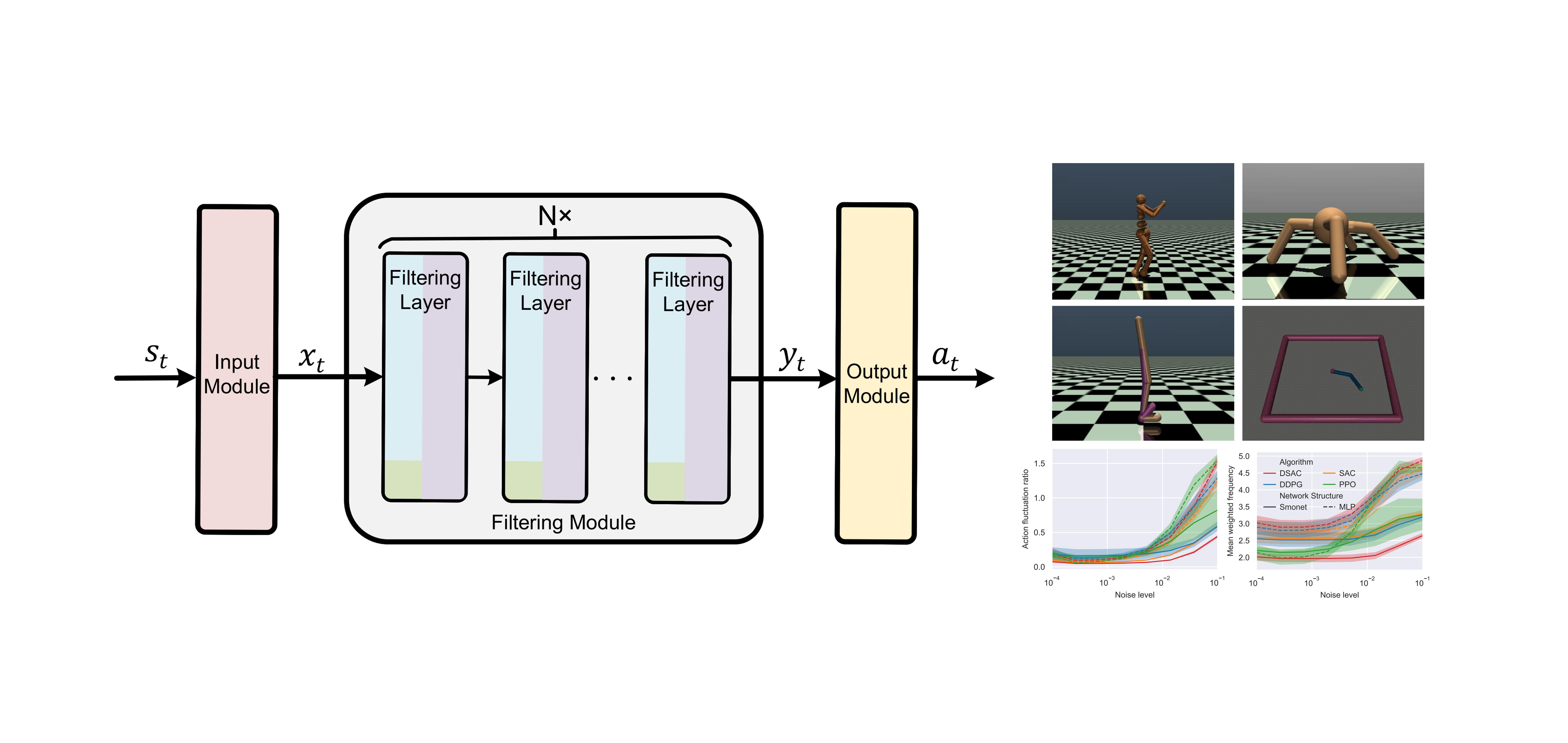
We proposed a policy network for RL with low-pass filtering ability, named Smonet, to alleviate the action nonsmoothness issue by learning a low-frequency representation within hidden layers.
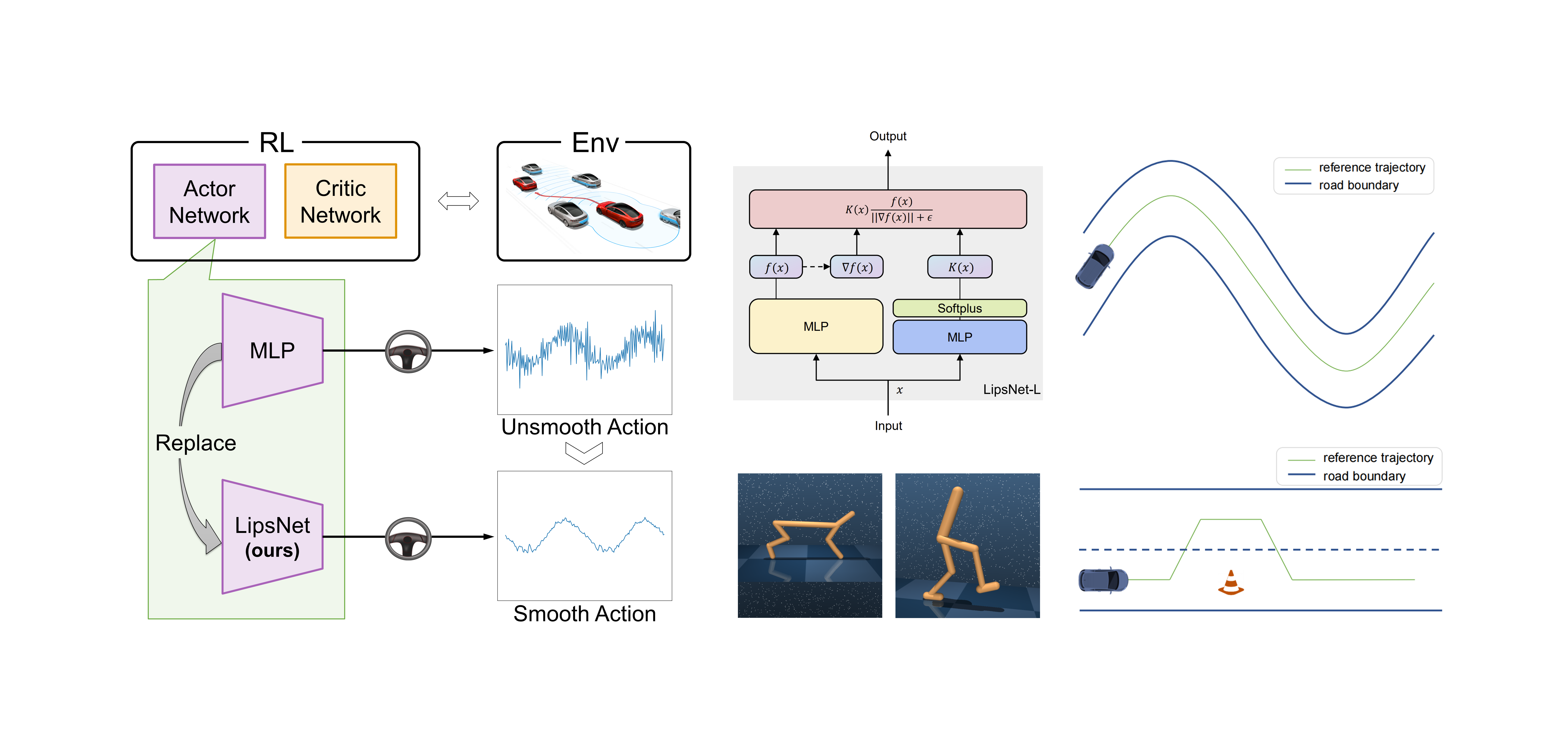
We proposed LipsNet, a smooth and robust neural network with adaptive Lipschitz constant, to deal with the action fluctuation problem in RL (reinforcement learning).
Publications
Competition Awards

Honors & Scholarships






Contact
- xjsong99@gmail.com
- University of Michigan, Ann Arbor, MI 48109