Biography
I am a PhD student in the Mobility Transformation Lab at the University of Michigan. Before that, I received a MSc from the Intelligent Driving Lab at Tsinghua University. My research covers autonomous driving, reinforcement learning, world model, and quantum computing. I am dedicated to building more intelligent and safer AI for automated vehicles, while also developing the next-generation paradigm for neural network training.
- Autonomous Driving
- Reinforcement Learning
- World Model
- Quantum Computing
University of Michigan
Ph.D.
Tsinghua University
M.Sc.
Recent News
🎉 $~$ 01 / 2026 $~$ - $~$ Elected as Student Board Member, ATAT
⚡ $~$ 09 / 2025 $~$ - $~$ 1 paper submitted to TPAMI
🎉 $~$ 07 / 2025 $~$ - $~$ 1 IEEE ITSC paper accepted
🎉 $~$ 05 / 2025 $~$ - $~$ 1 ICML (spotlight) paper accepted
🎉 $~$ 04 / 2025 $~$ - $~$ 1 IEEE IV paper accepted
🎉 $~$ 02 / 2025 $~$ - $~$ 1 ICLR (spotlight) paper accepted
🎉 $~$ 09 / 2024 $~$ - $~$ 1 NeurIPS paper accepted
🎉 $~$ 04 / 2023 $~$ - $~$ 1 ICML paper accepted
Experiences
Featured Publications
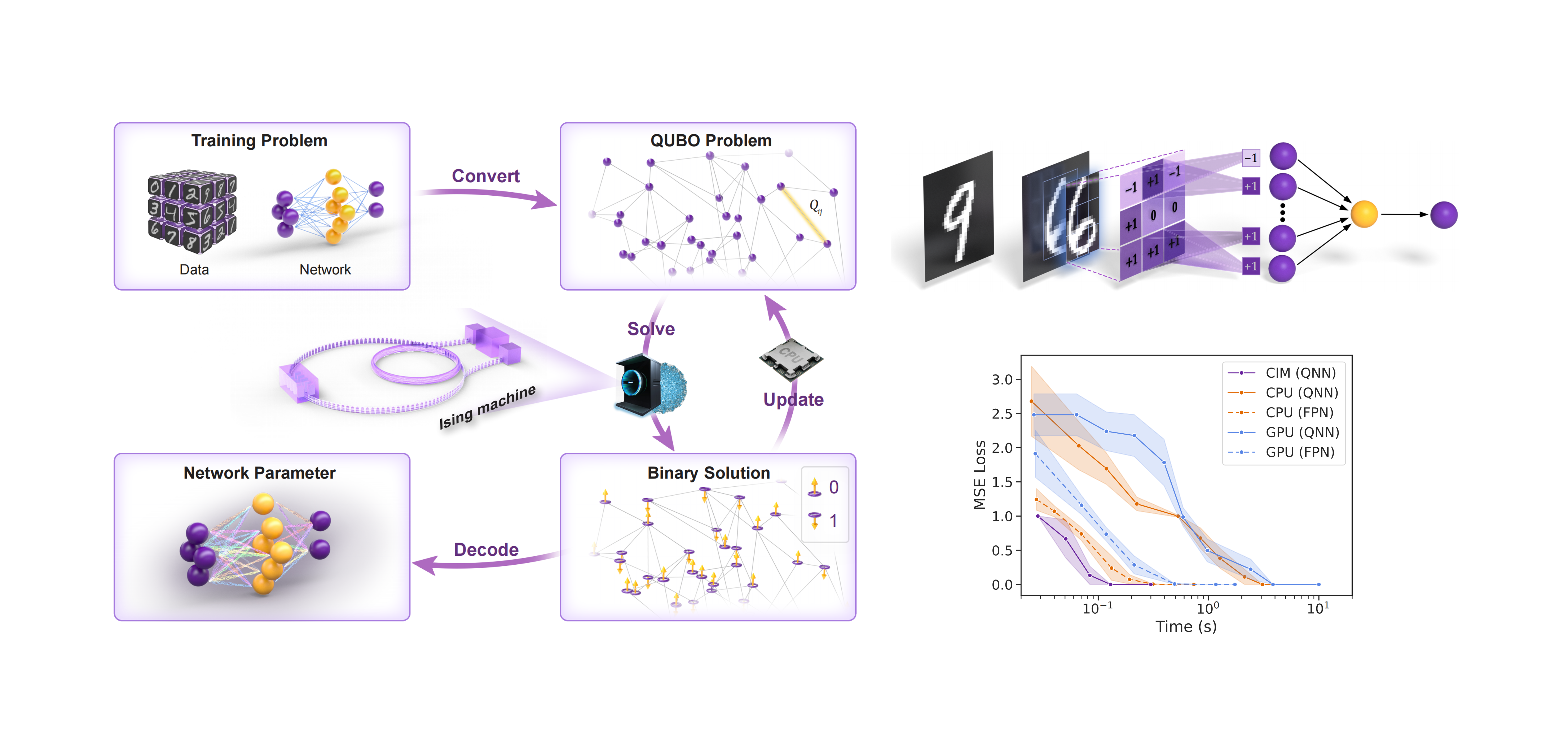
We proposed Ising learning algorithm, the first technique to train multilayer feedforward neural networks on Ising machines (quantum computers). The training time is reduced by 90% compared to CPU/GPU.
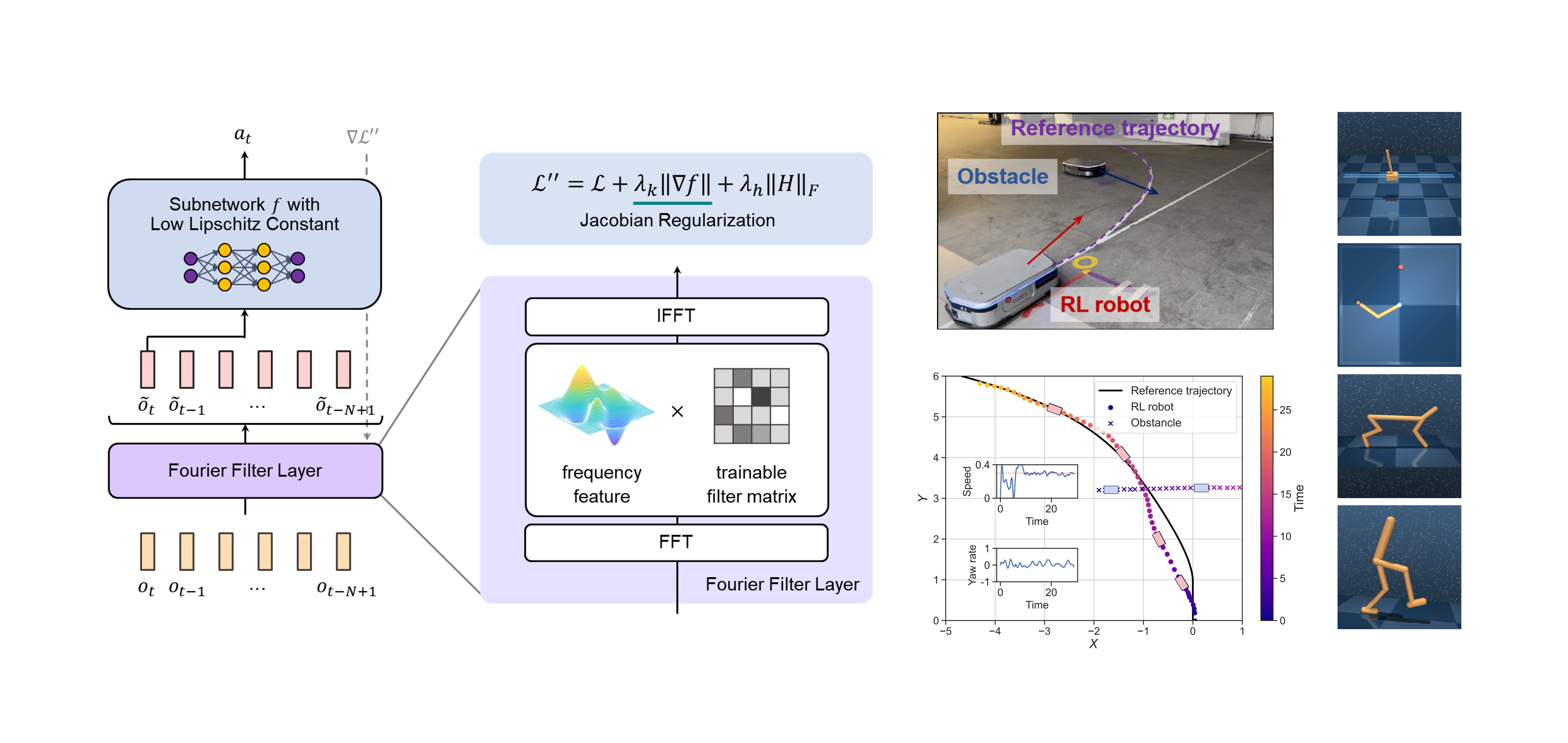
We unified the filtering and control capabilities into a single policy network in RL, achieving SOTA noise robustness and action smoothness in real-world control tasks.
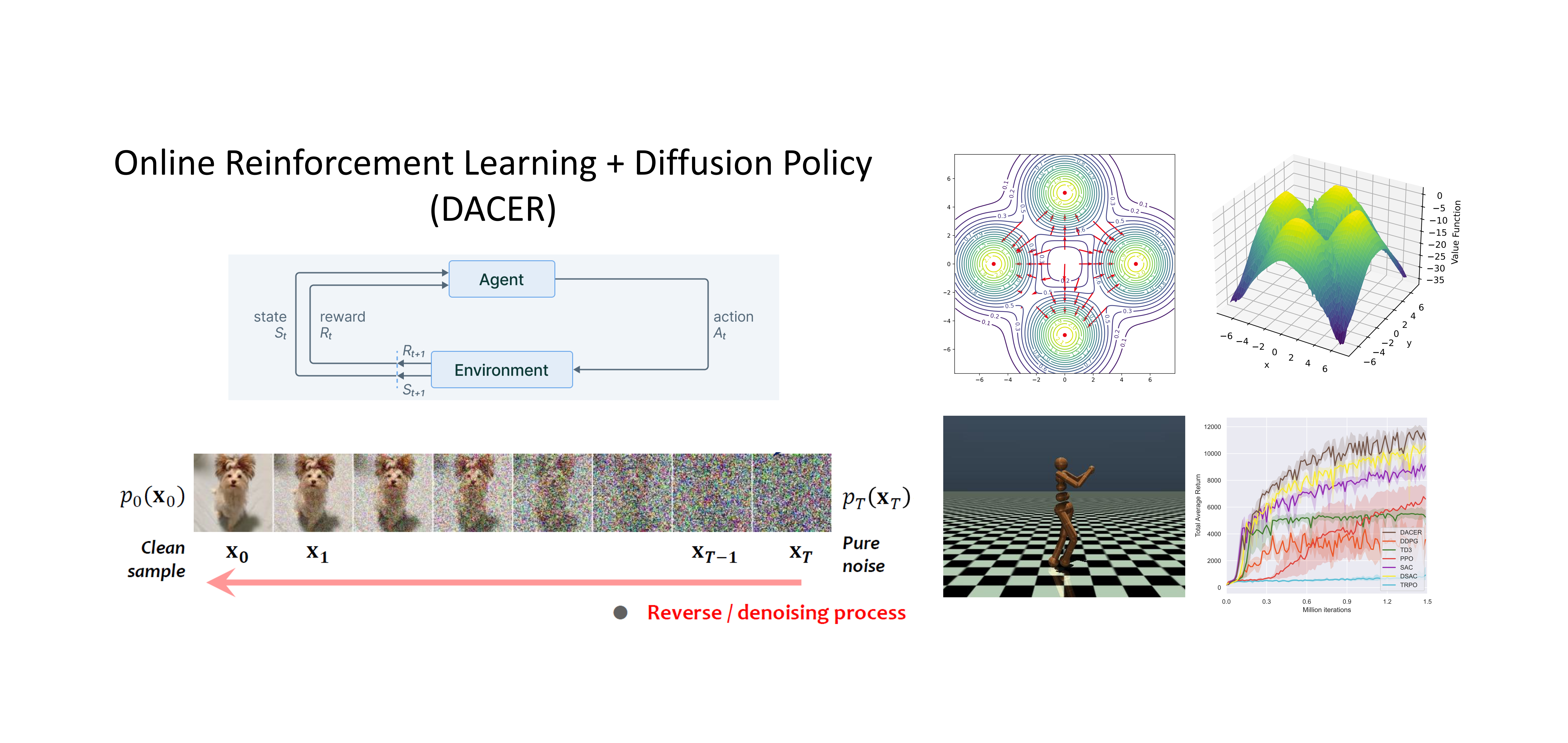
We proposed DACER, an online reinforcement learning algorithm that utilizes a diffusion model as the actor network to enhance the representational capacity of the policy.
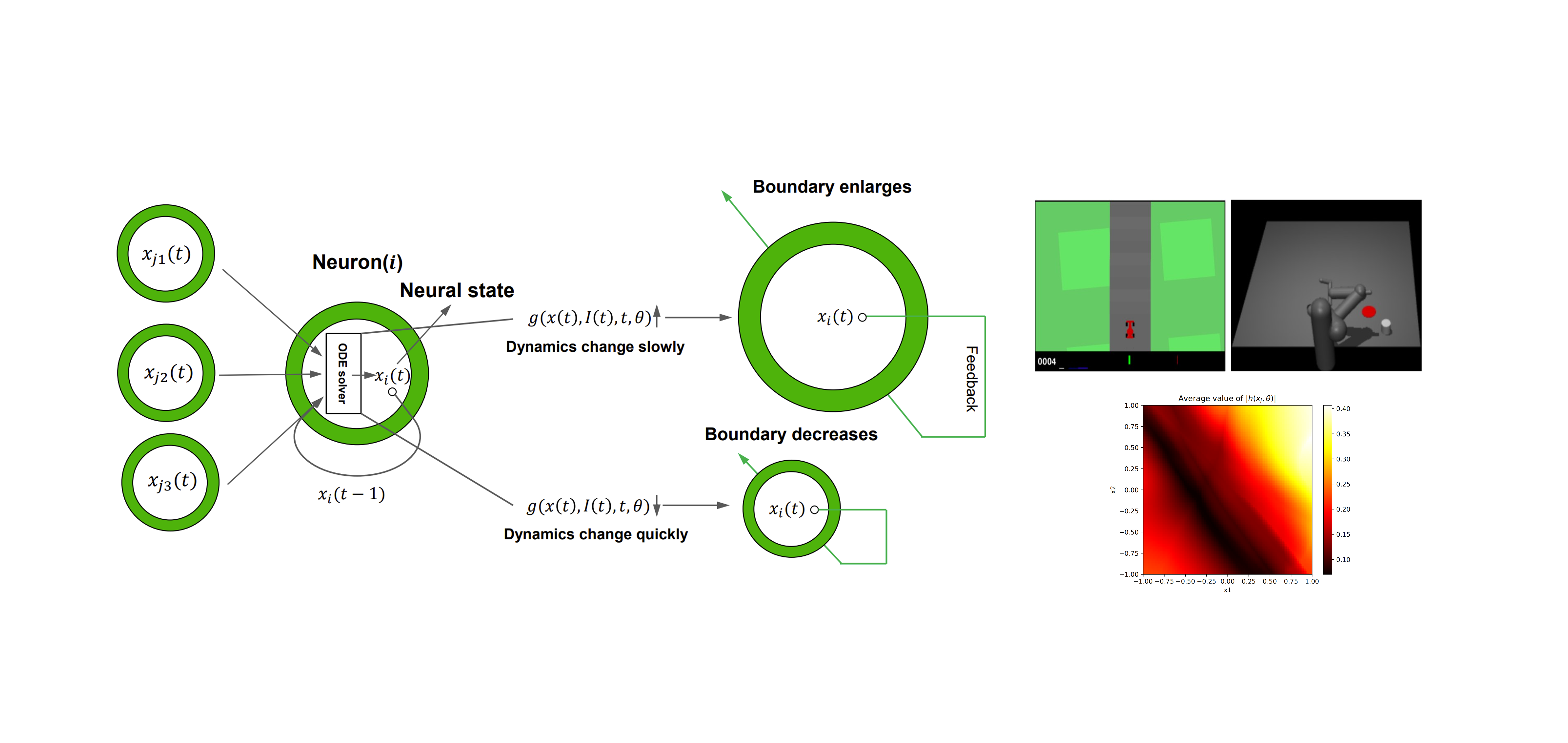
we proposed a variant of neural ODE, called SmODE, to smooth out control actions in RL. A mapping function is incorporated to estimate the changing speed of system dynamics.
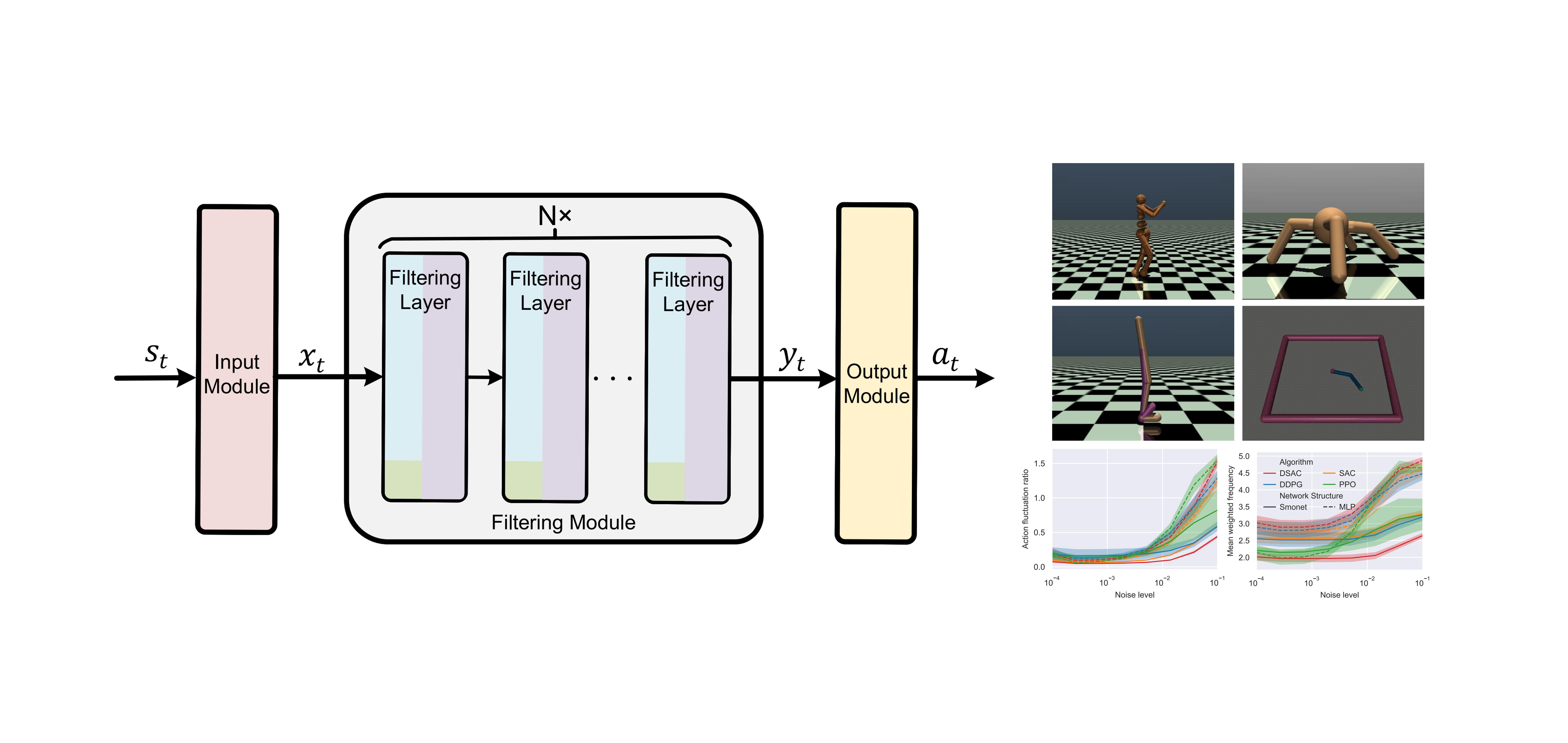
We proposed a policy network for RL with low-pass filtering ability, named Smonet, to alleviate the action nonsmoothness issue by learning a low-frequency representation within hidden layers.
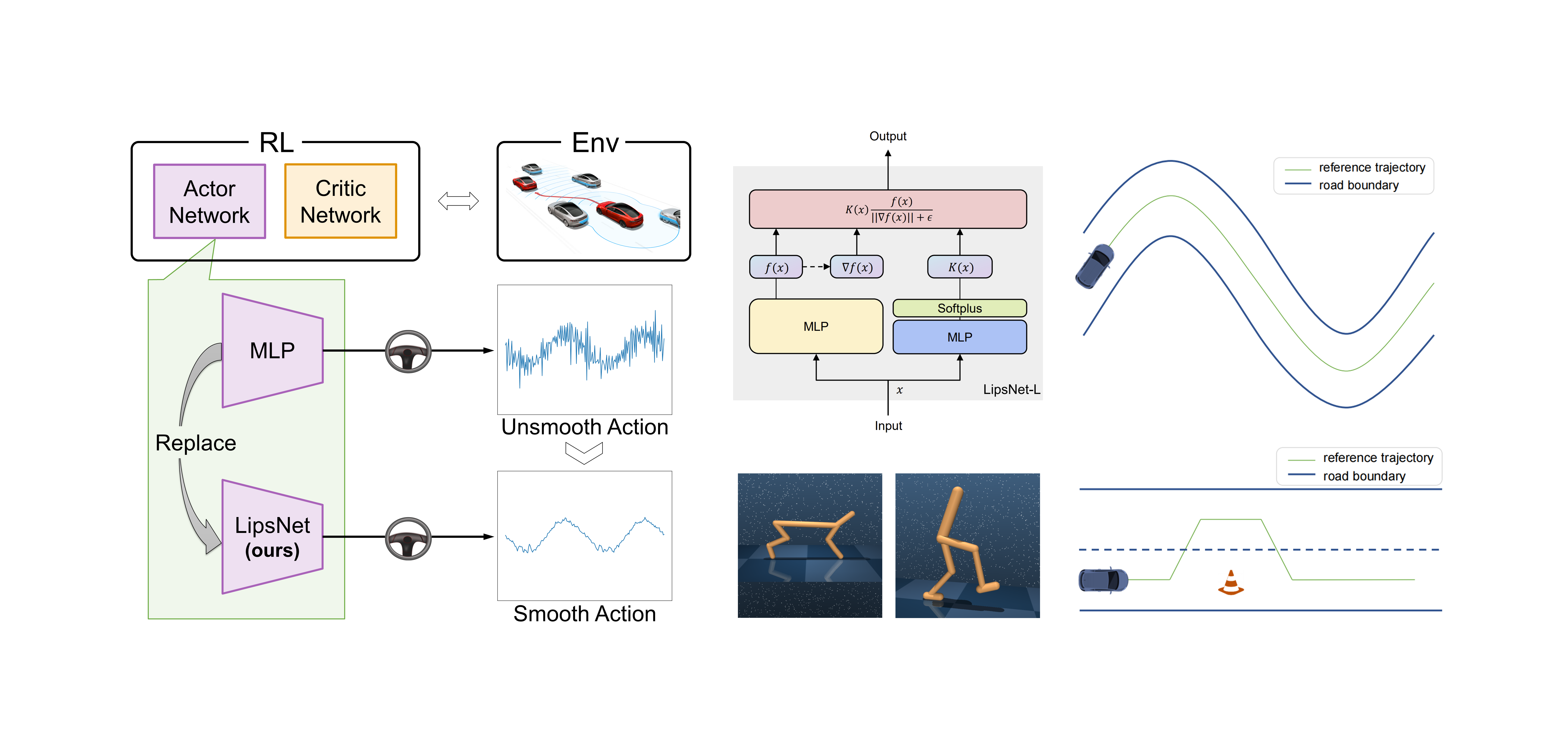
We proposed LipsNet, a smooth and robust neural network with adaptive Lipschitz constant, to deal with the action fluctuation problem in RL (reinforcement learning).
Publications
Competition Awards

Honors & Scholarships






Contact
- xjsong99@gmail.com
- University of Michigan, Ann Arbor, MI 48109